This page features projects designed and built by the students under the guidance of Dr. Iacopo Gentilini and Dr. Douglas Isenberg. The ideas for each project may come from the students, a competition or an industry company.
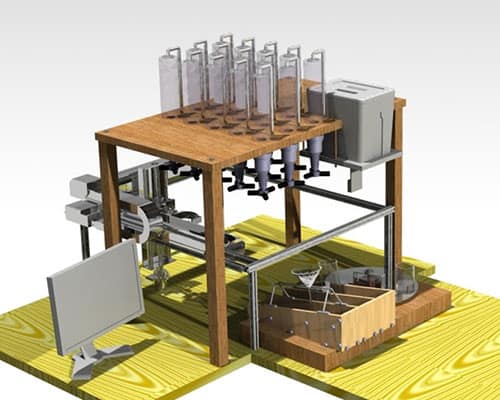
The ER-AA team seeks to reduce waste in the restaurant business by building a robot to pour and mix beverages with a high degree of precision.
For more information, visit the ER-AA website.
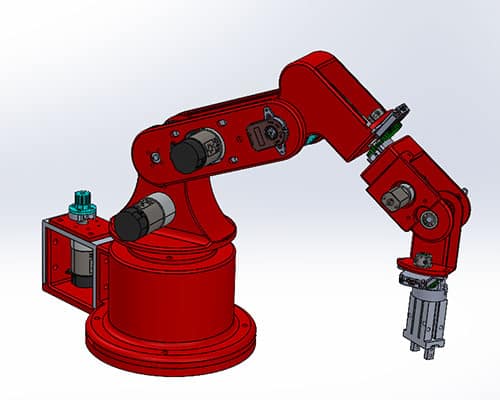
M.A.T.I.E. is a robotic manipulator specifically designed for education.
For more information, visit the M.A.T.I.E. website.
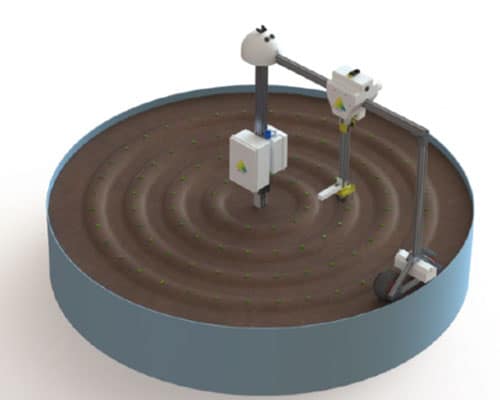
The NILE project aims to utilize robotics and autonomy to make agriculture more sustainable.
For more information, visit the NILE website.
The Heimdallr team is designing a quadrupedal mobile robot that can provide surveillance and security in a hazardous environment.
For more information, visit the Heimdallr website.
The BTO team is creating an active prosthetic for above-the-knee amputees to assist them in their everyday lives.
For more information, visit the BTO website.
TEMP aims to eliminate the potential for COVID-19 spread at wellness check stations by providing an autonomous robotic alternative to human employees at the stations.
For more information, visit the TEMP website.
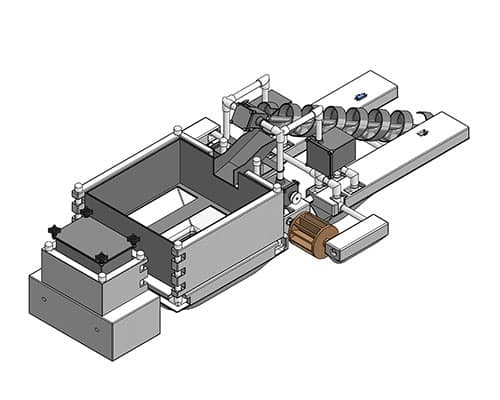
The NRG team is building a robotic system that is intended to automate the hamburger cooking process. Their project is based on a Yamaha FXYx Cartesian manipulator and works in conjunction with a standard grill/cooking surface.
For more information, visit the NRG website.
The Delphinus capstone team is designing and building an Unmanned Surface Vessel (USV). Their goal is to make the first USV that successfully circumnavigates the globe.
For more information, visit the Delphinus website.
The Meiosis team is designing an open-source, low-cost multi-axis robotic manipulator. Their goal is to create a platform that makes robotic manipulation more accessible to students and educators.
For more information, visit the Meiosis website.
The Simulated Control ENvironment for Active Robots in Orbit (SCENARIO) project seeks to recreate the motion exhibited by a planar space robot on an air-bearing surface with force-feedback control of a customized Hirata Cartesian Manipulator.
For more information, visit the SCENARIO website.
The Hyper-dexterous Animatronic Vision Operated Contraption (HAVOC) project seeks to create a fully operational multi-fingered robotic hand that can be teleoperated with visual motion capture of a human hand.
For more information, visit the HAVOC website.

1 A. Crammond, C. Boggio, J.C. Delinger, S.I. Jones, A. Katafiasz, D.R. Isenberg, “Commanding an Anthropomorphic Robotic Hand with Motion Capture Data," Proceedings of IEEE SoutheastCon, Huntsville, AL, 2019
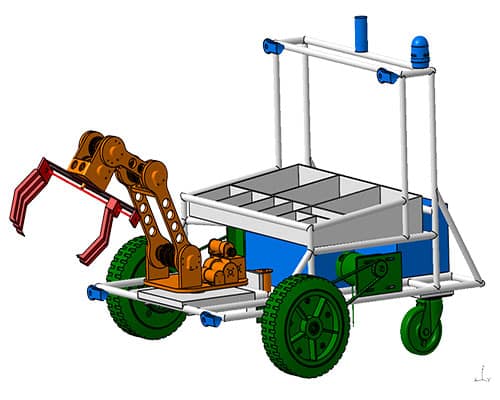
The 2017-2018 S.A.R.G.E. team consists of mechanical, electrical and software engineering students who are designing and developing an autonomous ground vehicle for search-and-rescue purposes. Project Search and Rescue Ground Explorer (S.A.R.G.E.) has two goals. The first goal is to create an autonomous ground vehicle that can assist in ground-based search-and-rescue missions. This includes carrying a payload of survival supplies (like food, water, shelter and basic medical supplies) and leading survivors out to a more suitable location for rescue.
The second goal is to compete in the26th Annual Intelligent Ground Vehicle Competition (IGVC), hosted by Oakland University in Rochester, Michigan, in June 2018. The IGVC has three separate competitions in which S.A.R.G.E. has specific goals in order to place near the top of the competition overall.
Project S.A.R.G.E. is a 1.34 m long, 0.96 m tall and 0.66 m wide autonomous ground vehicle comprised of a metal frame and a plastic shell. The vehicle will have several sensors to aid in obstacle avoidance for the IGVC and SAR missions. S.A.R.G.E. will also have a Graphic User Interface that can receive and can send data such as battery level and GPS coordinates.
The 2017-2018 SPARTA Robotics team consists of mechanical and electrical engineering students who are designing and developing a 6-DOF manipulator arm for Autonomous Rendezvous & Docking (AR&D) operations in space.
The goal of Sparta Robotics is to design a manipulator to grab onto and refuel a serviceable satellite. This is part of a larger project with the Coeus Prometheia Genna Astronautics Capstone Team. The purpose of the overall project is to design and construct a serviceable satellite and a refueling space robot possessing manipulation capabilities to interface with and supply fuel to the target vehicle. The astronautics system will focus on the design of the target and chase vehicles themselves, while the robotics system will focus on the manipulation and refueling capabilities of the chase vehicle. Sparta Robotics intends to complete this by designing a manipulator with six degrees of freedom and an end-effector capable of completing both the grabbing and refueling tasks.

The 2016-2017 Scorpius Robotics team consists of mechanical and electrical engineering students who are designing and developing a redundant 7-DOF Manipulator.
Firefighters are tasked with dangerous search-and-rescue missions into hazardous situations that endanger their lives. Scorpius Robotics has recognized this problem and designed a robot that can help in search-related efforts, possibly preventing firefighters from an unnecessary trip into a burning building. Scorpius Robotics proposes a redundant manipulator, the “Tail,” equipped with a FLIR Lepton thermal camera and thermal sensors that can identify hotspots.
The Tail will be mechanically connected to a hexapod body designed by the PreSept team (see below) for transport through the hazardous areas. Images will then be transmitted to an external viewing station for technical observation. The Tail has a total of seven degrees of freedom and is also capable of grasping lightweight objects using an additional claw. To fully demonstrate the dexterity of the Tail, Scorpius Robotics is taking the robot to competition at the 2017 Robogames. The Tail will be used to draw the Scorpius Robotics logo in a painting competition. This project has been co-sponsored by the College of Engineering, the Undergraduate Research Institute and Aptus Aerospace.

The 2016-2017 PreSept team consists of mechanical and electrical engineering students who are designing and developing a hexapod robotic platform.
The purpose of the project is to design and build a legged robot capable of competing in the 2017 RoboGames Walker Challenge and interface with an optionally attached manipulator. The competition course is three meters long and covered with various objects to create an unstable surface, which the legged robot must traverse quickly.
To optimize for the competition, a hexapod configuration was selected by the team. Furthermore, a tripod gait was implemented for walking, allowing the hexapod to move quickly while remaining stable. To allow the hexapod to interface with the manipulator, a serial communication protocol is implemented to allow for communication. Finally, while the manipulator is attached, the hexapod moves with a wave gait, which is slower, but allows five legs to always remain on the ground. This project has been co-sponsored by the College of Engineering, the Undergraduate Research Institute, Aptus Aerospace and the Intellectual Ventures Laboratory.
The 2015-2016 NARWHAL Robotics team consists of mechanical and electrical engineering students who are designing and developing an autonomous aquatic robot.
Algae in Watson Lake present a risk to the wildlife and has a negative impact on recreational activities. Clumps of algae floating on the surface present problems to boats out on the lake. Algae clogs up motors and makes fishing a pain. NARWHAL Robotics decided to take on the challenge of removing the dead algae on the lake. Navigating Autonomous Robot that Handles Aquatic Litter (NARWHAL) is an idea for a robot that would be able to skim Watson Lake in Prescott, Arizona, and collect and dispose of dead algae or trash floating on the surface.
For more information, please visit the NARWHAL Robotics webpage.
The 2015-2016 INCURVE Robotics team consists of mechanical and aerospace engineering students who are designing and developing an omnidirectional autonomous robot.
For more information, please visit the INCURVE Robotics webpage.
1 N. Muraleedharan, D. Cohen, D.R. Isenberg, “Omnidirectional Locomotion Control of a Pendulum Driven Spherical Robot," Proceedings: IEEE SoutheastCon, Norfolk, VA, 2016
Tour-PNADDERThe 2014-2015 Robotics Capstone team, The Riddle Rascals, consists of mechanical and electrical engineering students who are designing and developing an autonomous mobile robot called Tour-PNADDER.
Tour-PNADDER will be able to navigate between any defined “Point A” and “Point B” on the Embry-Riddle Prescott Campus. Upon start-up, Tour-PNADDER will localize its position as Point A and then wait for user-input to define Point B. Using a programmed position controller and various sensors (including encoders, cameras, Lidar and an IMU), the robot will travel along the paved walkways on campus, while avoiding obstacles, until the destination has been reached.
Tour-PNADDER is designed to be an active visual aid for tour groups visiting our campus. Seeing ERAU-developed technology in action will hopefully promote STEM popularity and attract students to the College of Engineering on campus. Possible future applications of Tour-PNADDER may even include fully autonomous campus tours.
For more information, please visit the Riddle Rascals webpage.

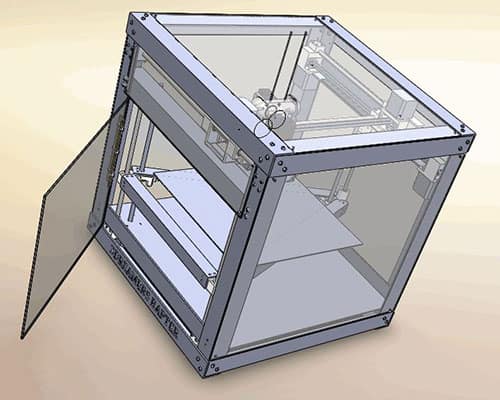
The RAPTER is a portable 3D printer designed for use by the service market. The product being designed is intended to be carried in a service truck and operated using the vehicle’s auxiliary power supply.
Embry-Riddle's Mechanical Engineering detail design team has been working on Heuristic Imaging Ground Based Environmental Explorer (HIGBEE) since Fall 2012. HIGBEE is an autonomous rover being built to compete in the NASA Sample Return Robot Challenge. The competition is scheduled for June 6, 2013, at Worchester Polytechnic Institute in Massachusetts.
HIGBEE must traverse an 80,000 m 2 playing field and recover 10 objects of varying shapes and sizes. The team's biggest challenge will be the identification of objects and keeping track of their location on the playing field. The project relies highly on the accuracy of the software developed by the 10-student team under the guidance of Dr. Douglas Isenberg.
Currently, the seven Mechanical Engineering students and three Electrical Engineering students have completed the chassis, electrical components and locomotion hardware, and are finishing assembling the manipulator arm. Once complete, the whole robot can be assembled for integrated testing.
Testing has been successfully completed on the locomotion system via handheld remote control and onboard computer. The remote may be used to transport the robot and for testing purposes, however, HIGBEE may not have any form of communication with the team during the competition.
LAR-E was originally built by a student team in 2010. It is a lunar mining robot that utilizes an innovative drum system to collect lunar dirt and carry it to another location. When the team went to the competition, a NASA award was created for the team to reward them for their creativity.